-
+86-17783090316
+86-17783090316

Эта статья предоставляет исчерпывающее руководство по выбору и применению установок для гусеничных мобильных роботов. Мы рассмотрим различные типы установок, их характеристики, преимущества и недостатки, а также примеры их использования в различных отраслях. Узнайте, как выбрать оптимальную установку для ваших конкретных задач, учитывая нагрузку, тип грунта и требуемую маневренность. В статье представлены реальные примеры и практические советы от экспертов.
Выбор шасси и ходовой части – критически важный этап при проектировании гусеничных мобильных роботов. Существуют различные типы гусеничных шасси, каждое из которых имеет свои преимущества и недостатки. Например, шасси с механической передачей более прочные и надежные, но менее эффективные с точки зрения энергопотребления, чем шасси с электрической передачей. Последние, в свою очередь, более легки в управлении и позволяют реализовать более сложные алгоритмы движения. Выбор зависит от конкретных задач и условий эксплуатации робота. Важно учитывать грузоподъемность, размеры, клиренс и тип грунта, по которому будет двигаться робот.
Выбор двигателей и приводов для установок для гусеничных мобильных роботов также является важным фактором. Наиболее распространенными являются электродвигатели постоянного тока и шаговые двигатели. Электродвигатели постоянного тока обеспечивают высокую мощность и эффективность, а шаговые двигатели позволяют достичь высокой точности позиционирования. Выбор типа двигателя зависит от требуемой мощности, точности и стоимости.
Современные установки для гусеничных мобильных роботов часто оснащаются сложными системами управления, которые позволяют реализовать автоматическое управление движением, навигацию и ориентацию в пространстве. Эти системы могут включать в себя сенсоры, такие как гироскопы, акселерометры и GPS-приемники, а также программное обеспечение для обработки данных и управления движением робота. Возможность интеграции с различными системами управления и навигации – важный аспект при выборе установки. ООО Чунцин Бэйли Интеллектуальные Технологии предлагает передовые решения в этой области.
Выбор оптимальной установки для гусеничного мобильного робота зависит от конкретных задач, которые он должен выполнять. Например, для работы на ровной поверхности подходят установки с простым шасси и небольшим клиренсом. Для работы на неровной местности требуются установки с высоким клиренсом и прочной ходовой частью. Для работы в ограниченном пространстве необходимы компактные установки с малым радиусом поворота.
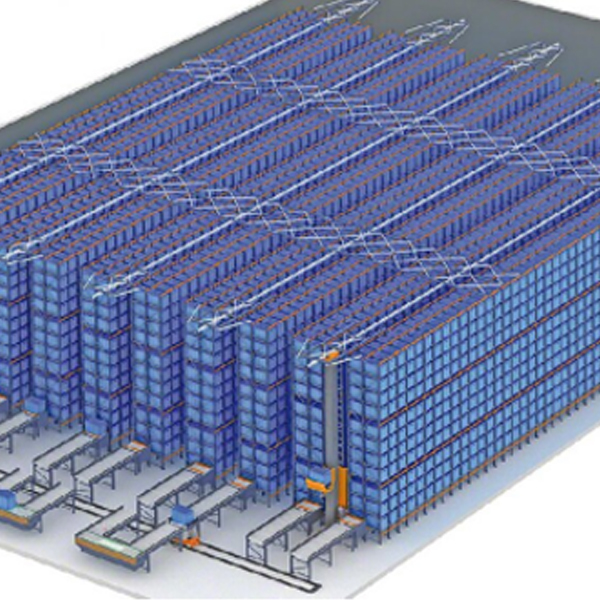
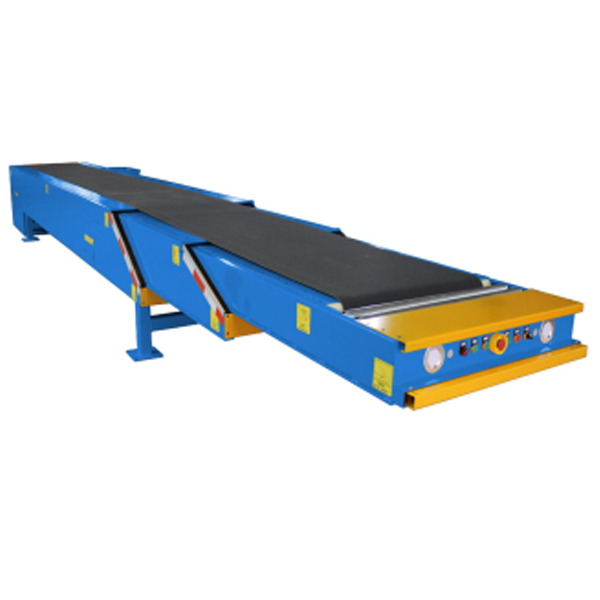
Установки для гусеничных мобильных роботов находят широкое применение в различных отраслях, включая сельское хозяйство (для обработки почвы, опрыскивания и уборки урожая), строительство (для перемещения грузов и выполнения других задач), логистику (для перемещения грузов в складах и на территории предприятий) и исследования (для проведения исследований в труднодоступных местах).
| Характеристика | Установка A | Установка B |
|---|---|---|
| Грузоподъемность | 100 кг | 200 кг |
| Скорость | 5 км/ч | 3 км/ч |
| Клиренс | 15 см | 20 см |
Обратитесь к специалистам ООО Чунцин Бэйли Интеллектуальные Технологии для получения подробной информации и консультации по выбору установок для гусеничных мобильных роботов.