-
+86-17783090316
+86-17783090316

В данной статье мы подробно рассмотрим процесс установки для четырехногих роботов, начиная от выбора подходящего оборудования и заканчивая настройкой программного обеспечения. Мы предоставим информацию о различных типах установок, их преимуществах и недостатках, а также поделимся практическими советами и рекомендациями, которые помогут вам успешно установить и настроить вашего робота. Статья будет полезна как начинающим, так и опытным пользователям, желающим расширить свои знания в области робототехники.
Первый шаг в процессе установки для четырехногих роботов – это выбор подходящего оборудования. Существует множество различных типов установок, предназначенных для выполнения различных задач. При выборе установки необходимо учитывать следующие факторы:
На рынке представлены различные типы установок. Рассмотрим наиболее распространенные:
Опорно-поворотные устройства (ОПУ) – это механические системы, обеспечивающие вращение и наклон робота в пространстве. Они часто используются в промышленных роботах для позиционирования сварочных головок, покрасочных пистолетов и других инструментов. Они обеспечивают высокую точность позиционирования, но могут быть сложными в установке и настройке. Для получения более подробной информации об ОПУ, рекомендуем посетить сайт ООО Чунцин Бэйли Интеллектуальные Технологии.
Линейные приводы используются для перемещения робота по прямой траектории. Они просты в установке и эксплуатации, но ограничены в пространственном перемещении. Они отлично подходят для задач, требующих точного линейного перемещения.
Системы управления движением (СУД) – это сложные электронные устройства, управляющие перемещением робота. Они включают в себя контроллеры, датчики, приводы и другое оборудование. СУД обеспечивают высокую гибкость и функциональность, позволяя реализовывать сложные траектории движения.
Процесс установки обычно включает следующие этапы:
Перед началом установки необходимо подготовить площадку, обеспечив ровную и устойчивую поверхность. Убедитесь, что на площадке достаточно места для робота и сопутствующего оборудования. Также важно обеспечить доступ к электропитанию и сети.
На этом этапе осуществляется монтаж механических компонентов установки: опор, направляющих, приводов и т.д. Следуйте инструкциям производителя, соблюдайте технику безопасности и используйте соответствующие инструменты.
Подключите установку к электропитанию в соответствии с требованиями производителя. Убедитесь, что напряжение соответствует параметрам установки и что все соединения надежны.
Установите и настройте программное обеспечение, необходимое для управления роботом. Это может включать в себя драйверы, программы для управления движением и приложения для обработки данных. Следуйте инструкциям производителя и используйте рекомендации по настройке.
После установки и настройки необходимо провести калибровку и тестирование. Это позволит убедиться в точности работы установки и выявить возможные проблемы. Проведите несколько тестовых запусков и проверьте все функции.
Для обеспечения долговечности и надежной работы установки необходимо соблюдать следующие рекомендации:
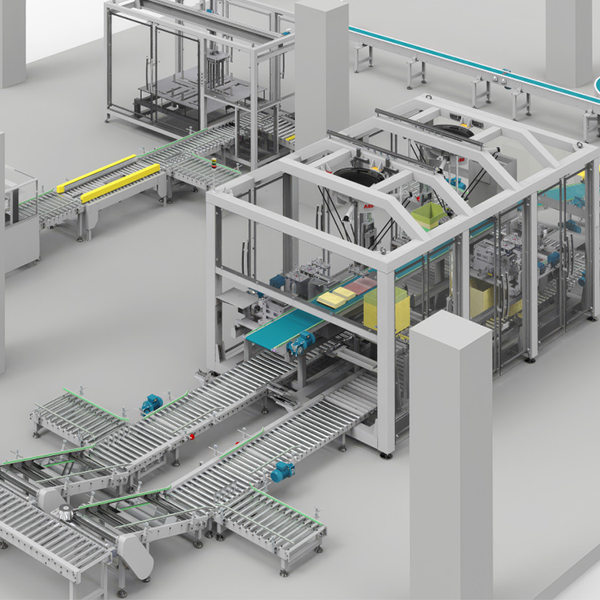
Установки для четырехногих роботов находят применение в различных областях:
Предлагаем сравнение нескольких популярных моделей установок для четырехногих роботов (указаны усредненные значения):
| Характеристика | Модель A | Модель B | Модель C |
|---|---|---|---|
| Грузоподъемность (кг) | 10 | 15 | 8 |
| Скорость (км/ч) | 6 | 8 | 7 |
| Диапазон рабочих температур (°C) | -10 to 40 | -20 to 50 | 0 to 35 |
| Цена (USD) | 5000 | 7500 | 4000 |
Данное сравнение носит ознакомительный характер. Перед покупкой рекомендуется внимательно изучить характеристики каждой модели и проконсультироваться со специалистами.
Установка для четырехногих роботов – это сложный, но важный процесс. Следуя рекомендациям, изложенным в этой статье, вы сможете успешно установить и настроить своего робота. Помните о важности выбора подходящего оборудования, соблюдении правил безопасности и регулярном техническом обслуживании. Удачи в ваших проектах!