-
+86-17783090316
+86-17783090316

Эта статья предоставляет исчерпывающий обзор систем мобильного робота, включая их архитектуру, типы, приложения и ключевые технологии. Мы рассмотрим различные подходы к проектированию, а также обсудим преимущества и недостатки каждой из них. Вы узнаете, как выбрать подходящую систему для ваших конкретных задач, и найдете практические советы по ее внедрению и эксплуатации. Материал основан на исследованиях и реальных примерах применения.
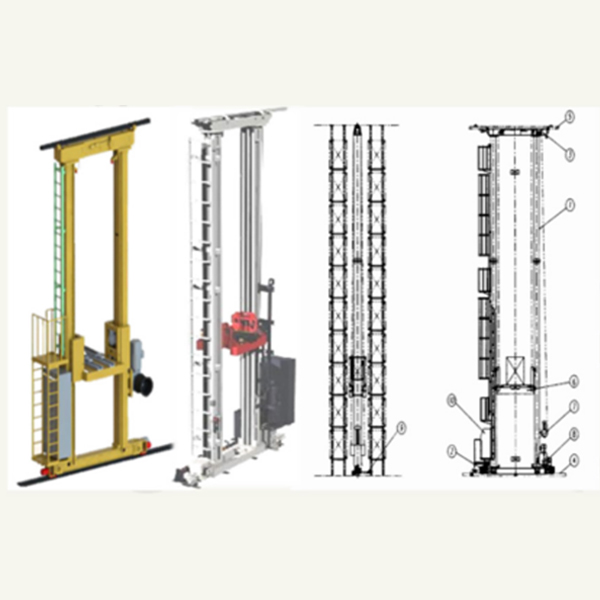
Типичная система мобильного робота включает в себя несколько ключевых компонентов: механическую платформу (шасси, колеса, гусеницы), систему управления (микроконтроллер, процессор, программное обеспечение), сенсорную систему (датчики расстояния, камеры, лидары), систему навигации (GPS, SLAM), и исполнительные механизмы (двигатели, сервоприводы).
Существуют различные архитектуры систем мобильного робота, включая централизованную, децентрализованную и иерархическую. Выбор архитектуры зависит от сложности задачи и требований к надежности системы. Централизованная архитектура проще в реализации, но менее надежна, в то время как децентрализованная архитектура более сложна, но обладает большей отказоустойчивостью. Иерархическая архитектура сочетает в себе преимущества обеих.
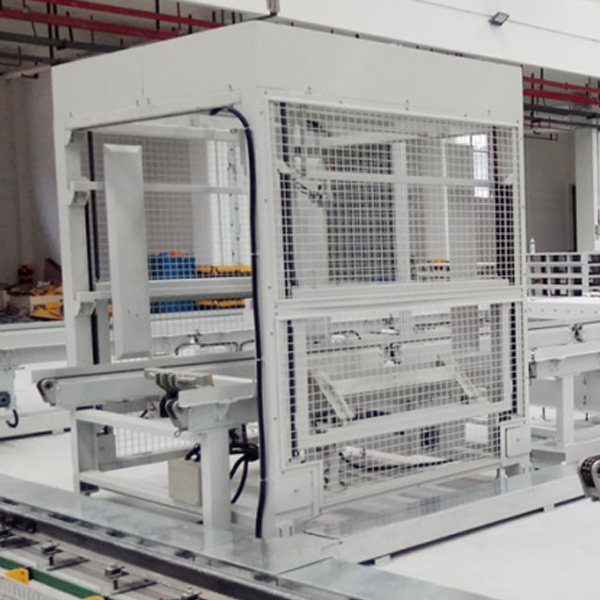
Колесные роботы – наиболее распространенный тип мобильных роботов, отличающиеся простотой конструкции и высокой маневренностью. Они подходят для работы в ровных условиях.
Гусеничные роботы обладают большей проходимостью, чем колесные, и способны преодолевать неровности местности. Они часто используются в сложных условиях, таких как строительные площадки или бездорожье.
Роботы с ногами обладают наибольшей адаптивностью к неровному рельефу, но более сложны в разработке и управлении. Они пока находятся на стадии активного развития.
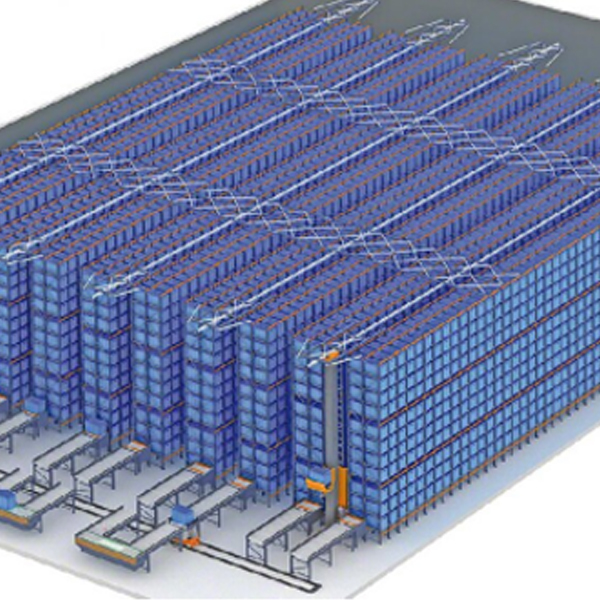
Системы мобильного робота находят широкое применение в различных областях, включая:
Выбор подходящей системы мобильного робота зависит от конкретных задач и ограничений. Необходимо учитывать такие факторы, как тип местности, нагрузка, требуемая точность наведения, бюджет и другие.
| Характеристика | Колесная платформа | Гусеничная платформа | Платформа с ногами |
|---|---|---|---|
| Проходимость | Низкая | Высокая | Очень высокая |
| Маневренность | Высокая | Средняя | Низкая |
| Сложность разработки | Низкая | Средняя | Высокая |
Для получения более подробной информации о системах мобильного робота и их применении, пожалуйста, свяжитесь с нами. Вы также можете посетить сайт ООО Чунцин Бэйли Интеллектуальные Технологии для получения дополнительной информации о наших решениях в этой области.
1 Данные взяты из открытых источников и исследований в области робототехники.