-
+86-17783090316
+86-17783090316

Роботизированная система комплектации обладает более высокой эффективностью, лучшей масштабируемостью и гибкостью по сравнению с ручной системой комплектации. Весь процесс заказа, погрузки и разгрузки, комплектации и доставки может быть автоматизирован, интеллектуализирован и отслеживается на протяжении всего процесса.
Роботизированная система подачи посылок: подача посылок является важной частью обработки посылок. Робот с системой технического зрения захватывает и помещает посылки (различные упаковки типа конвертов, пенопластовые конверты, логистические коробки и т. д.) на конвейерную ленту.
Роботизированная система комплектации: под руководством 3D-видения система может идентифицировать и захватывать мелкие предметы различных размеров и спецификаций для комплектации заказов. В основном используется на логистических складах и в других зонах циркуляции, при многовидовом, многосерийном и мелкосерийном складировании заказов со склада.

Интеллектуальные роботизированные системы паллетирования: стандартные схемы паллетирования могут быть разработаны для максимального использования паллет на основе размеров коробок и досок, введенных заказчиком. Стандартные схемы паллетирования разработаны для логистической отрасли, чтобы адаптироваться к сценариям транспортировки.

Роботизированная система разгрузки и комплектации: использование машинных приспособлений вместо ручной разгрузки и перемещения, механические приспособления могут быть адаптированы к размерам товаров, требуемых заказчиком. Интегрирует ряд операций, таких как разгрузка грузовиков, перемещение, укладка на поддоны, обертывание пленкой, маркировка и складирование.
Сцена 1
Высокоскоростной робот-паллетизатор использует высокоскоростной захват для тканых мешков во время высокоскоростной обработки тканых мешков. Высокоскоростной робот-паллетизатор в системе паллетирования имеет 4 степени свободы, небольшой корпус и тонкие и гибкие руки.

Сцена 2
В сценарии легкой картонной упаковки продуктов, высокоскоростной процесс обработки паллет роботами с губчатыми присосками захватывает, губка адаптируется к различным поверхностям, содержащим шероховатости или неровности, всасывая различные коробки без регулировки. Авточувствительный переключатель губчатой присоски позволяет автоматически закрывать неконтактный обратный клапан независимо от того, захватывает ли она весь слой или его часть, или отдельный объект, реализуя универсальность одного и того же набора инструментов для присасывания.

Сцена 3
В случае тяжелых картонных изделий захват с присосками робота системы паллетирования картонных изделий поставляется с нижним кронштейном, и картонные изделия после всасывания поддерживаются нижним кронштейном, что позволяет эффективно гарантировать безопасность и надежность погрузочно-разгрузочных работ и паллетирования.

| Длина, ширина и высота автомобиля | 2250мм*830мм*1880мм (при условии окончательного проектирования) |
| Режим навигации | Лазерная навигация |
| Точность линейного наведения | ±10мм |
| Точность парковки | ±10м |
| Способ вождения | Штурвальный привод |
| Номинальная скорость | 0-60, м/мин |
| Минимальный радиус поворота | 1800 мм |
| Размер вилки | 85/180/1200 мм |
| Наружная ширина вилки W | 540/685 мм |
| защита безопасности | Лазерная/механическая/аварийная остановка тройная защита |
| Ширина канала (лоток 1200*800 мм) | 2900 мм |
| Способность к лазанию | 4\6% |
| способ нагрузки | Вилочно-транспортный тип |
| номинальная грузоподъемность | ≤3000кг |
| высота вил | 85 мм |
| высота подъема | 120 мм |
| Дедвейт транспортного средства | 735 КГ |
| Напряжение / емкость батареи | 24V/150Ah |
| Способ зарядки | Автоматическая зарядка |
| Способ связи | Беспроводная локальная сеть |
| Форма сигнала тревоги | Звуковая и световая сигнализация |
Подходит для полевого патрулирования, аварийно-спасательных работ, наружных работ и другого портативного использования.

Психопропагандистский четвероногий робот – это легкий четвероногий робот, оснащенный системой видеонаблюдения и разведки, мощным громкоговорителем и переговорным устройством.
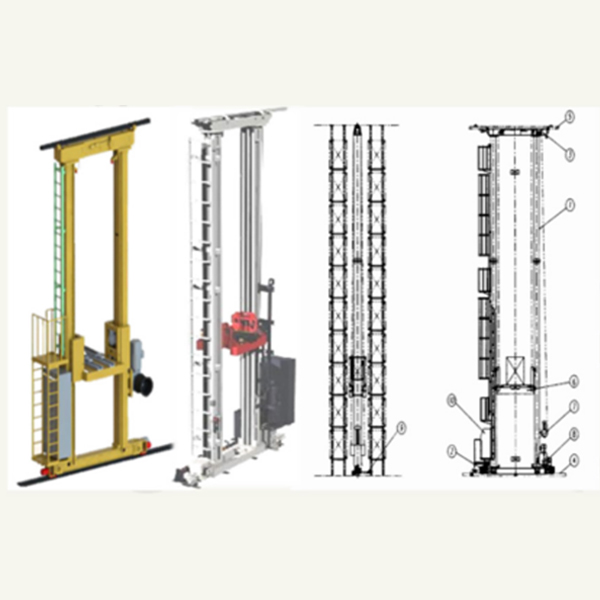
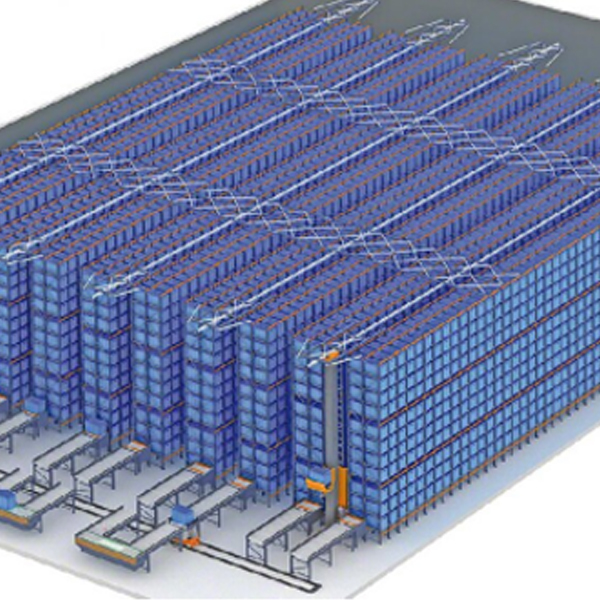
Стеллажный штабелёр: Стеллажный штабелёр является ключевым оборудованием автоматизированного стеллажного склада.которые выполняют функцию захвата и доставки товаров, совершая трехмерные движения в направлении X.Y.Z на трехмерных складах.
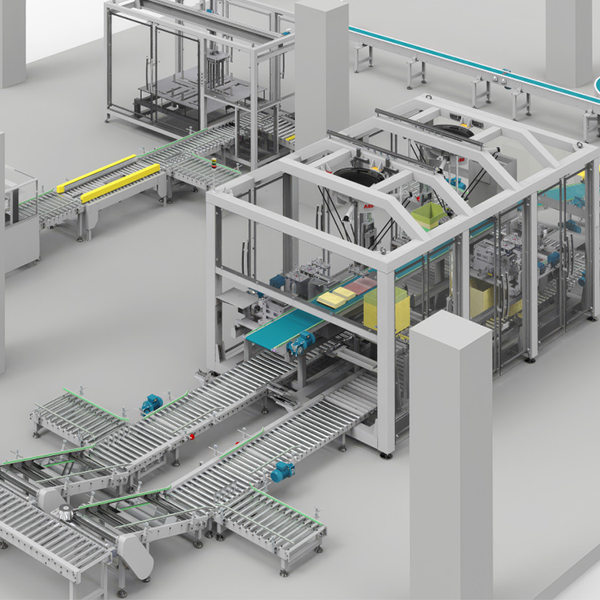
Линия послепечатной упаковки — это полностью автоматизированная производственная линия, разработанная по индивидуальным требованиям заказчика.

Вилочные погрузчики AGV и в основном используются на складах и в доках.

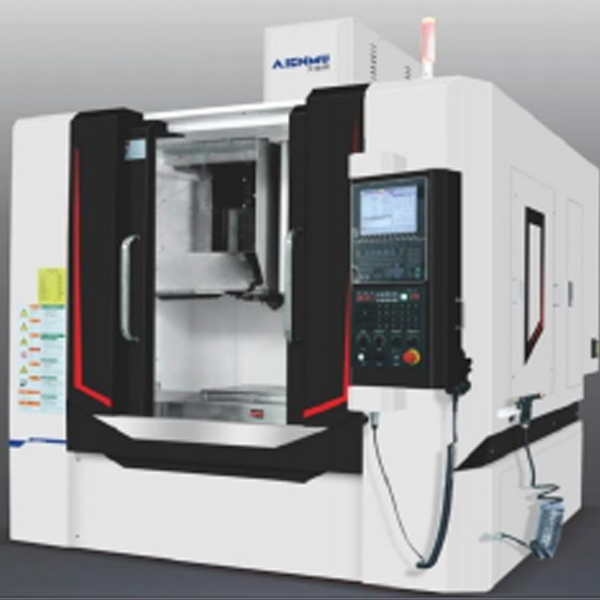
Высокоскоростной гравировально-фрезерный станок в основном предназначен для фрезерной обработки металла и других материалов и точной гравировки.

В электронной и машиностроительной промышленности сборочные роботы используются для автоматизированной сборки и тестирования изделий с целью повышения производительности и качества продукции.

части фундамента изготовлены из смоляной смеси формованием и полностью старения обработки, что обеспечивает гарантию стабильности производительности долгосрочного использования.

Бионическая четырехногая роботизированная платформа – это интеллектуальная роботизированная система, основанная на принципе бионической механики, обладающая способностью проходить через дискретные участки местности, выбираться из сложных участков.

которая состыкована с ERP-системой, и может реализовать интеллектуальное распределение, оборот и складирование деталей, полуфабрикатов, готовой продукции и так далее.
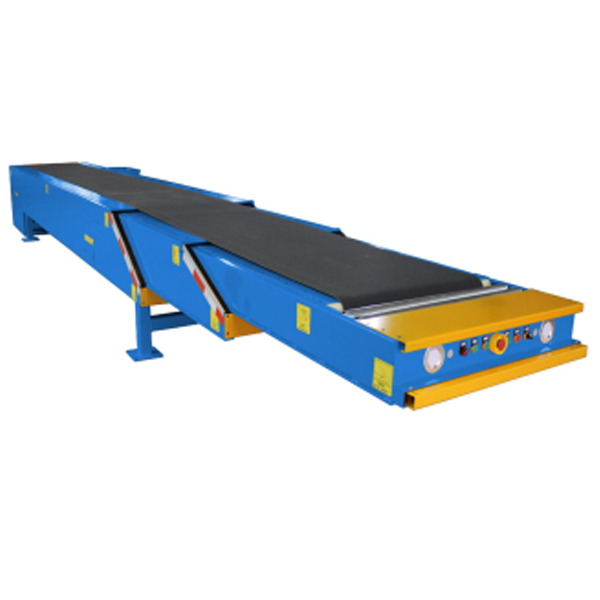
Телескопический конвейер представляет собой непрерывное транспортное оборудование, способное свободно изменять длину в продольном направлении и гибко регулировать протяжённость подачи.

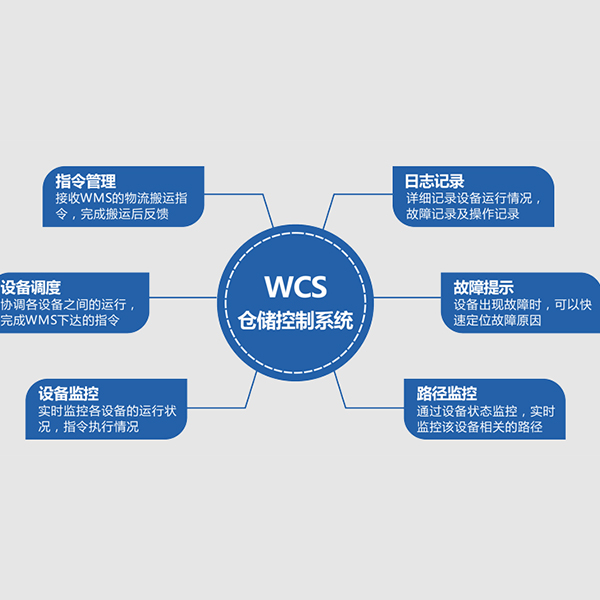
AGV-штабелер – это лазерная система навигации и управления на базе традиционного электрического погрузчика-штабелера.Используемая вместе с системой WM S, она улучшает автоматизацию склада и помогает предприятиям перейти от производства к «умному» производству, а также неуклонно развиваться в направлении цифровизации, беспилотного управления и высокой эффективности.

Вертикальный обрабатывающий центр (три проволочных рельса) Структура станины прочная и может выдержать инерцию, создаваемую движением с высокой G.
Высокоскоростные вертикальные обрабатывающие центры с прямым приводом в основном используются для сверхточной обработки новых материалов в полупроводниковой, водородной/фотоэлектрической новой энергетике, лазерном оборудовании, медицинском оборудовании, авиации и аэрокосмической промышленности, точных пресс-формах и штампах и новой энергетической автомобильной промышленности.

Роликовые AGV с магнитным управлением: саморазгружающиеся роликовые AGV с приводом способны легко взаимодействовать с производственными линиями и соединительными платформами сборочных линий, обеспечивая автоматизированную беспилотную обработку, и адаптируются к большинству стандартных размеров паллет, представленных на рынке.

RGV используется во всех видах высокой плотности хранения режим трехмерного склада, тележка канала в соответствии с потребностями дизайна, и в обработке, перемещение товаров без другого оборудования в проход, быстрая скорость, высокая безопасность, может эффективно повысить операционную эффективность складской системы.