-
+86-17783090316
+86-17783090316

Эта статья предоставляет исчерпывающий обзор производителей сценариев работы мобильных роботов, охватывая ключевые аспекты разработки, выбора и внедрения ПО для автоматизированных мобильных систем. Вы узнаете о различных типах программного обеспечения, их функциональности и лучших практиках для успешной интеграции в вашу рабочую среду. Мы рассмотрим как крупные международные компании, так и перспективных игроков на рынке.
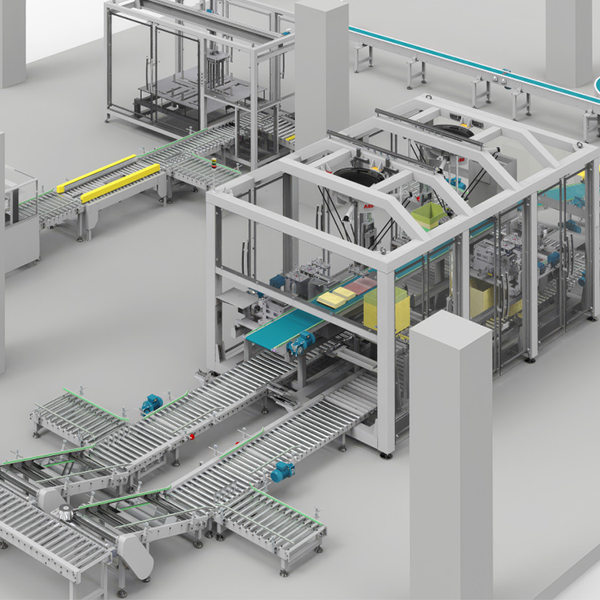
Программное обеспечение для управления движением является основой для работы любого мобильного робота. Оно отвечает за планирование траектории, избегание препятствий, навигацию и позиционирование робота в пространстве. Современные системы часто используют алгоритмы SLAM (Simultaneous Localization and Mapping), позволяющие роботу строить карту окружающей среды и одновременно определять свое местоположение на ней. При выборе системы управления движением важно учитывать такие факторы, как точность позиционирования, скорость обработки данных и возможность интеграции с другими системами.
Если ваш мобильный робот выполняет манипуляционные операции, вам потребуется программное обеспечение для управления его манипулятором. Это ПО отвечает за точное позиционирование и управление захватом предметов. Важно выбрать систему, которая обеспечивает плавное и точное управление, минимальное время цикла и возможность работы с различными типами захватных устройств.
Системы компьютерного зрения позволяют мобильному роботу 'видеть' и интерпретировать окружающую среду. Они используются для распознавания объектов, измерения расстояний, навигации и других задач. Современные системы компьютерного зрения часто используют глубокое обучение (deep learning) для повышения точности и скорости обработки информации. Выбор системы компьютерного зрения зависит от конкретных задач и условий работы робота.
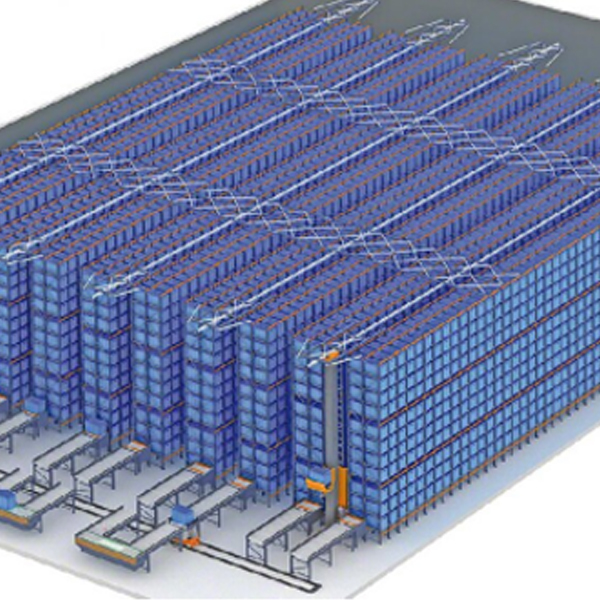
Для эффективной работы мобильный робот часто нуждается в интеграции с другими системами, такими как системы управления складом (WMS), системы планирования производства (MES) или другие информационные системы. Программное обеспечение для интеграции и управления обеспечивает связь между роботом и этими системами, позволяя обмениваться данными и координировать действия.
Выбор производителя программного обеспечения для мобильных роботов – критически важный этап. Необходимо учитывать множество факторов, таких как функциональность ПО, поддержка различных типов роботов, наличие технической поддержки и стоимость. На рынке представлены как крупные международные компании, так и специализированные разработчики, предлагающие решения для узких ниш.
При выборе производителей сценариев работы мобильных роботов рекомендуется обращать внимание на:
Рынок производителей сценариев работы мобильных роботов постоянно развивается, появляются новые игроки и технологии. Для получения более подробной информации о конкретных производителей, рекомендуется обратиться к их официальным веб-сайтам.
Некоторые известные компании, занимающиеся разработкой ПО для мобильных роботов, включают (список не является исчерпывающим): [Список компаний с ссылками rel='nofollow']
Выбор правильного программного обеспечения для мобильных роботов – ключ к успешной автоматизации. Тщательный анализ потребностей, исследование рынка и консультации со специалистами помогут вам сделать оптимальный выбор и добиться максимальной эффективности от использования мобильных роботов. Обращайтесь к профессионалам за помощью в выборе и интеграции производителей сценариев работы мобильных роботов.
Для получения дополнительной информации и консультации по вопросам автоматизации и робототехники, пожалуйста, свяжитесь с нами в ООО Чунцин Бэйли Интеллектуальные Технологии (https://www.cqblkj.ru/).